
‹
›
‹
›
Partager:
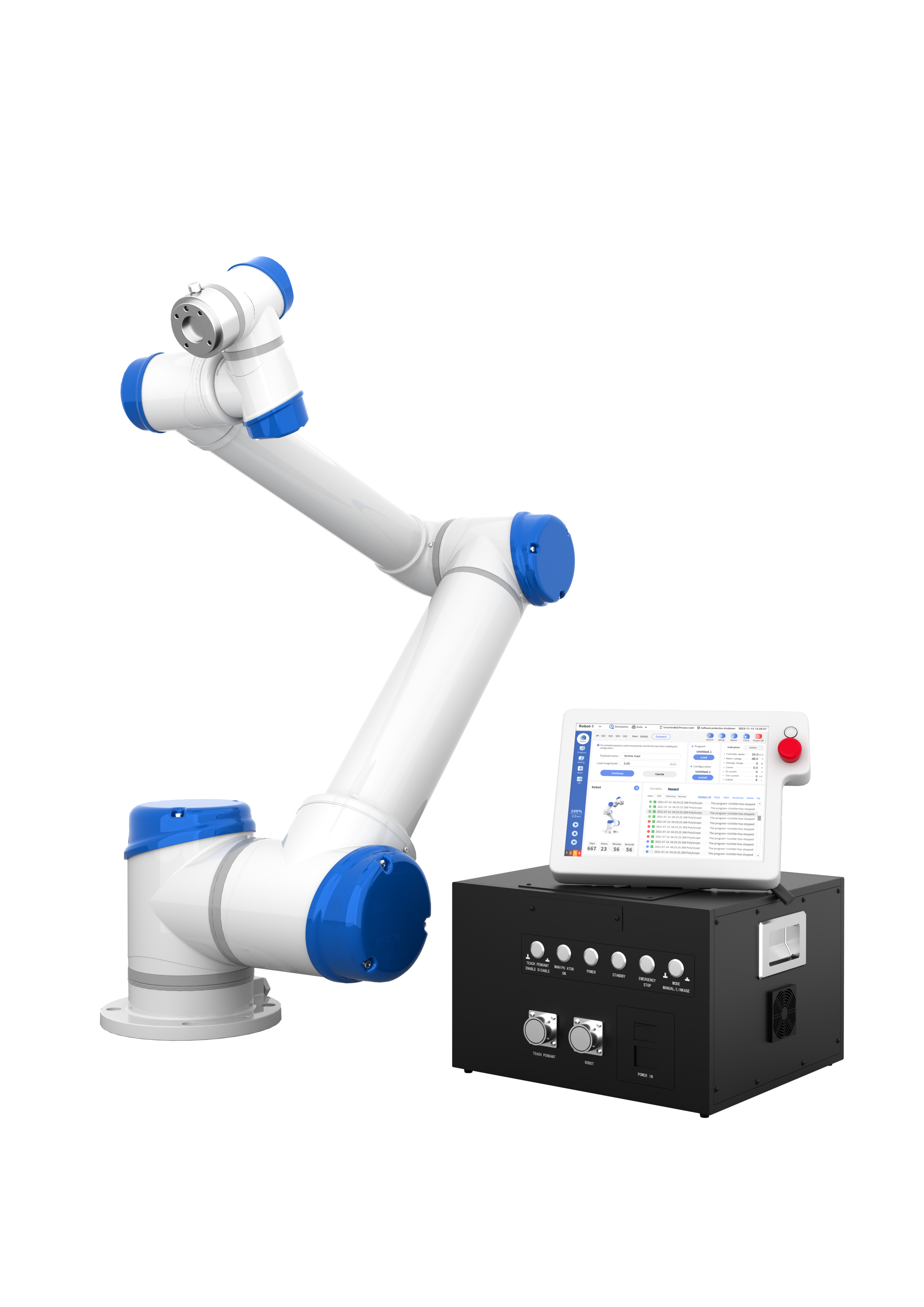
Programmation facile : terminal de commande avec écran 12,5" ; il faut une demi-heure pour maîtriser la méthode de programmation et une heure pour réaliser une programmation facile.
Enseignement par glisser-déposer : intuitif et pratique, localisation rapide
Ensemble de processus de soudage avancé et plusieurs types d'oscillations : bonne interconnexion et intercommunication avec les machines à souder et aspect parfait des cordons de soudure
Plate-forme système ouverte : prenant en charge plusieurs méthodes de communication, capable d'établir une communication avec divers équipements d'extrémité, suivi laser et autres équipements périphériques, pratique à déployer dans diverses conditions et environnements de travail
Réponse hautement sensible : prise en charge de la détection de collision à 10 niveaux et réalisation d'une coopération homme-machine sans erreur
Taux de rendement de production considérablement amélioré : la précision de la localisation répétée peut atteindre ± 0,02 mm ; Il peut accomplir en continu des tâches avec des exigences de haute précision pendant une longue période
15 minutes pour terminer le montage : de petite taille, léger et capable de se déplacer
Niveau de protection IP54 : adaptable aux environnements sévères


MESSAGE EN LIGNE
PRODUITS CONNEXES